
今回は赤外線レーザーとCdsセルで人感センサーを自作します。
赤外線人感センサであるHC-SR501がすでに存在しますが、レーザー人感センサのメリットを考えてみます。
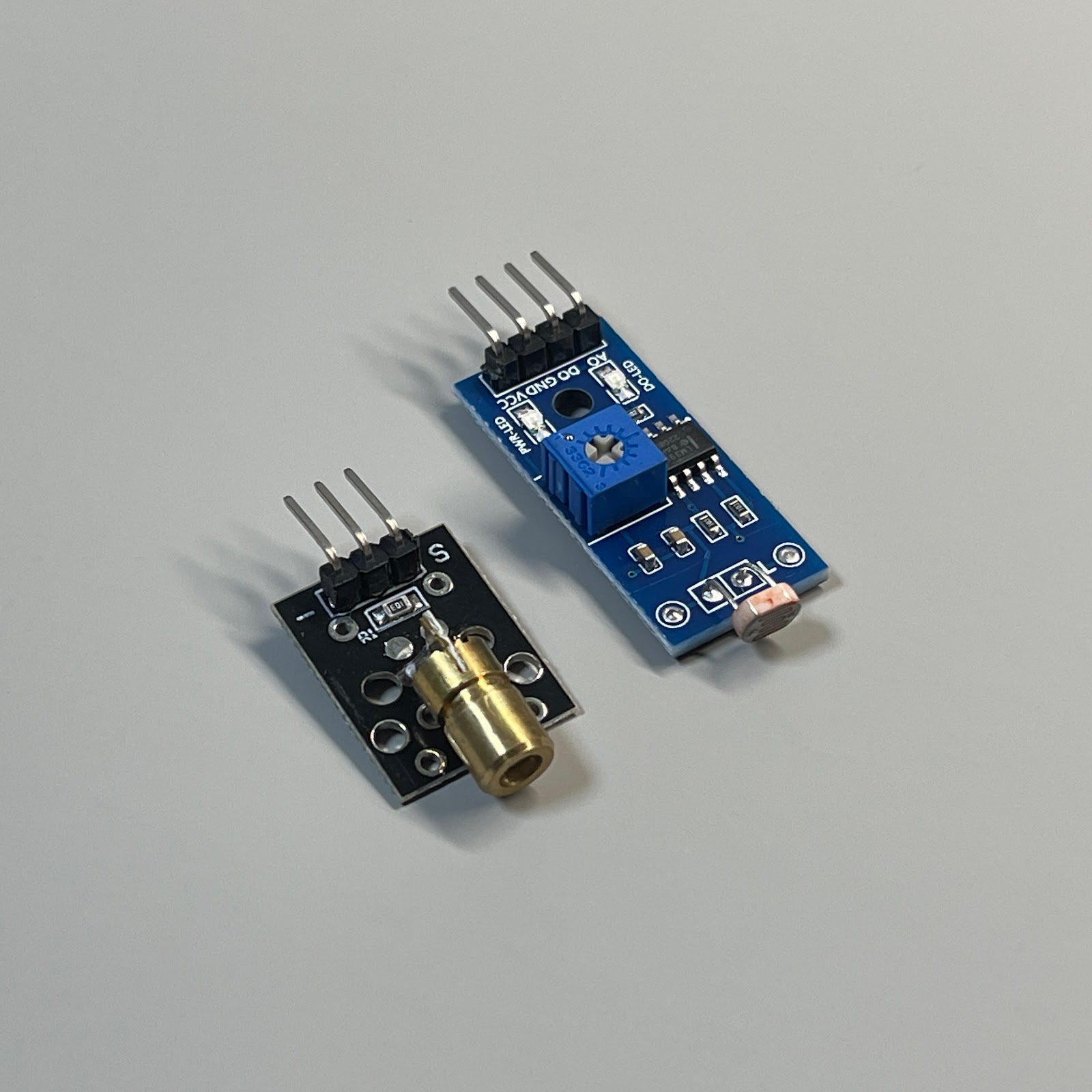
赤外線レーザーモジュールを使用しています。
レーザーを直接目で見ないように注意してください。
最終目標
レーザー式人感センサーの構成
レーザーを常にCdsに当てておきます。
物体が赤外線レーザーを遮断するとCdsの出力する値が変化します。
Cdsが出す値に応じて物体が通過したことを検出します。

レーザー式人感センサの特徴
1.人間(動物)以外も認識可能
HC-SR501は人体から発せられた赤外線の変化をセンサーで受光することで人の存在を認識します。
今回作成する人感センサーはレーザーから発せられた赤外線が遮断されたかどうかを検出し、人体(物体)の存在を認識することができます。
そのため、赤外線を発しないモノに対して用いることができます。
2.範囲が限定的かつ微調整できる
HC-SR501の検出範囲は3m~7mかつ120°の範囲で検出します。
広い範囲で認識させる用途(部屋のライトを点灯させる)では活躍します。
ですが狭い範囲に絞って用いることは難しいです。
レーザー式であれば、レーザーからCdsまでの距離が検出範囲になるため、「0m~レーザーの届く範囲」で調整可能です。
実現したい動き
かなりシンプルです。
今回のCdsはDO(デジタルリード)に接続しているため0か1かの判断になります。
サーボモーターを動かしてみる
実行結果
変数「switch」の値を毎回切り替えることでサーボの回転角も毎回切り替わります。
赤外線を遮断しない透明な素材の物体は検知できません。
用途について
「人感センサー」を自作するつもりでしたが赤外線レーザーを使用しているため、人体や動物に向けて使用したくはないです。
レーザーを直接目で見ることができないようにケースを作成して、「手をかざすとライトをつける」等の動作を行うことはできそうです。
物体の数を数えることもできそうです。








0 件のコメント:
コメントを投稿